在災(zāi)后救援、大型機(jī)械裝備檢修等場景,仿生機(jī)器“昆蟲”大有可為,業(yè)界一直在尋找適配的高效動力系統(tǒng)。北京航空航天大學(xué)科研團(tuán)隊(duì),成功實(shí)現(xiàn)微型動力技術(shù)新突破,并基于此研發(fā)出一款仿生“昆蟲”,實(shí)現(xiàn)了昆蟲尺寸(2厘米)機(jī)器人的脫線可控爬行。相關(guān)成果近日在國際學(xué)術(shù)期刊《自然·通訊》發(fā)表。

聲明:凡資訊來源注明為其他媒體來源的信息,均為轉(zhuǎn)載自其他媒體,并不代表本網(wǎng)站贊同其觀點(diǎn),也不代表本網(wǎng)站對其真實(shí)性負(fù)責(zé)。您若對該文章內(nèi)容有任何疑問或質(zhì)疑,請立即與清智科技官網(wǎng)(sxdtsy.com)聯(lián)系,本網(wǎng)站將迅速給您回應(yīng)并做處理。
核心團(tuán)隊(duì)
核心的整體解決方案服務(wù)能力
產(chǎn)品研發(fā)和性能關(guān)鍵技術(shù)
標(biāo)準(zhǔn)化制造的關(guān)鍵技術(shù)
高柔性化產(chǎn)線的關(guān)鍵技術(shù)
智能化關(guān)鍵技術(shù)
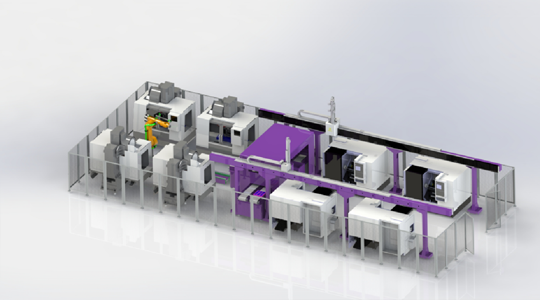
TZ-MG高速智能桁架機(jī)器人產(chǎn)線
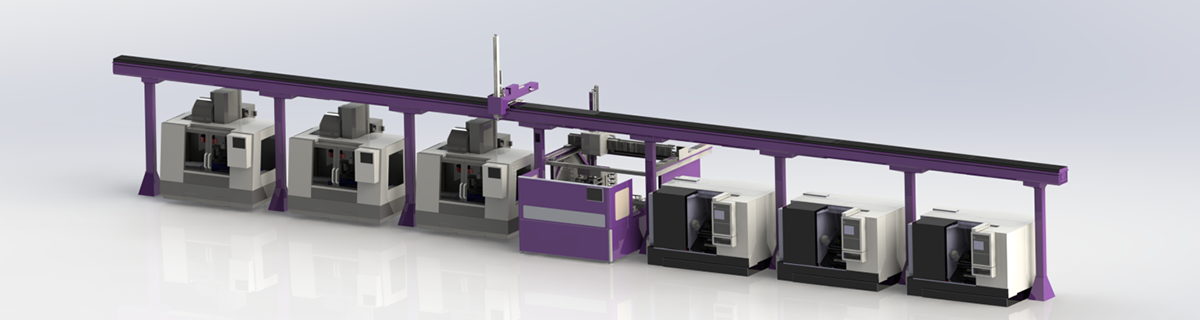
TZ-MB復(fù)合高速智能桁架機(jī)器人產(chǎn)線
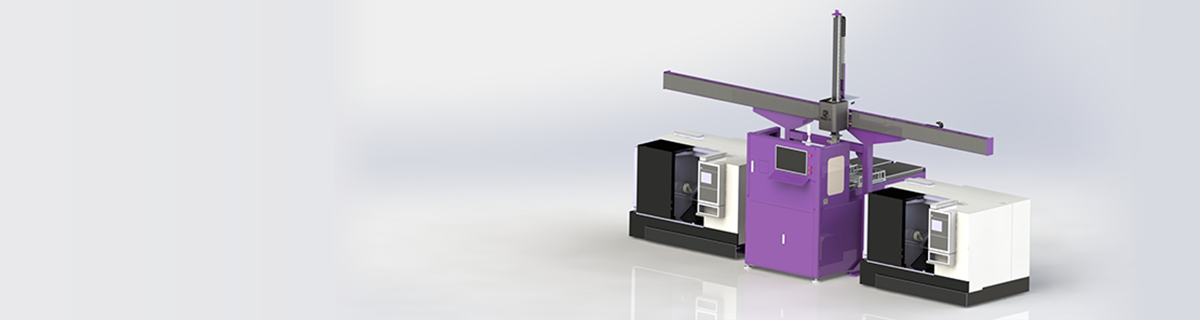
TZ-MZ重型智能桁架機(jī)器人產(chǎn)線
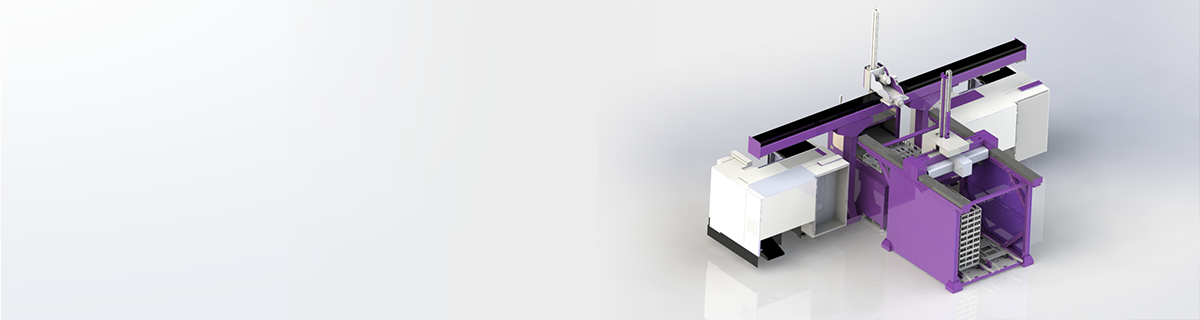
TZ-MU超重型智能桁架系列機(jī)器人產(chǎn)線
TZ-HB復(fù)合高速智能桁架機(jī)器人產(chǎn)線
TZ-HG高速智能桁架機(jī)器人產(chǎn)線
TZ-HZ經(jīng)濟(jì)型高速智能桁架機(jī)器人產(chǎn)線
TZ-SZ高速智能桁架機(jī)器人產(chǎn)線